
運転振り返りロボットの開発

運転振り返りロボットは、ドライバーが自分の運転を客観的に見直し、安全運転につなげることを支援するロボットです。運転中の映像や走行状況をもとに、帰宅後や運転後にロボットと一緒に運転内容を振り返ることで、危険な場面、判断が難しかった場面、改善できる行動を確認できるようにします。特に高齢ドライバーの運転技能の維持・向上では、継続的な振り返りが重要ですが、教習所などに通う方法には時間的・地理的な制約があります。そのため、本研究では、自宅などの身近な環境で、より気軽に運転を見直せる仕組みとして、運転振り返りロボットの開発を進めています。
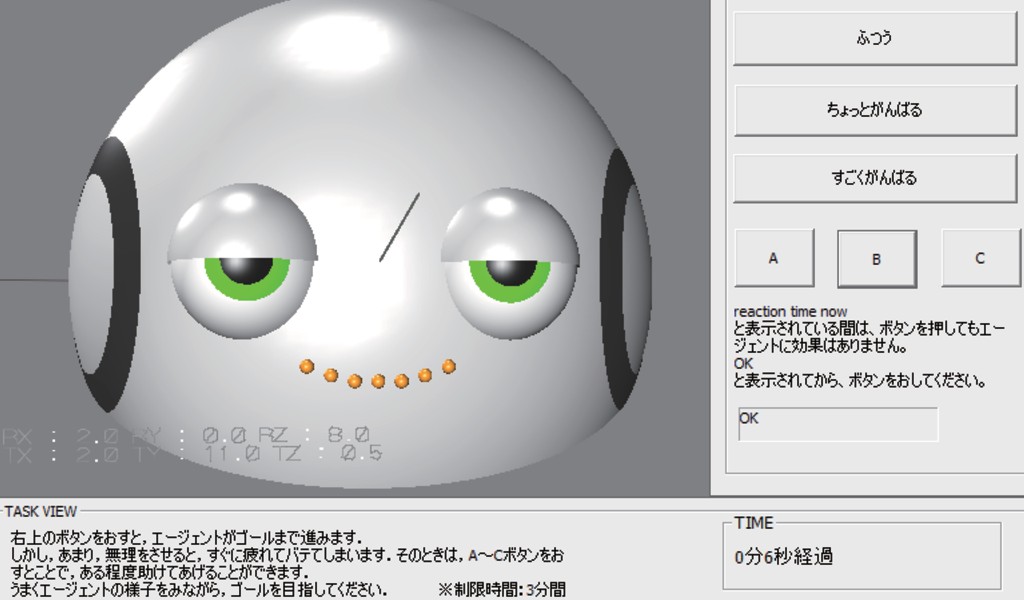
これまでに、危険運転動画を用いて運転行動を教示する方法、ドライブシミュレータで振り返りを促す方法、Mixed Realityを用いた運転振り返り支援、ジェスチャ入力による操作方法、車両と歩行者の側方通過距離の推定、右折時の危険度推定などを検討してきました。また、ロボットへの名付けや敬称の付与、発話の抑揚などが、ロボットへの愛着や支援の受け入れやすさに与える影響も調べています。単に危険を指摘するだけでなく、ドライバーが納得して振り返りを続けられる関係性を設計することで、日常生活の中で利用しやすい安全運転支援の実現を目指しています。