踏破難易度別の瓦礫フィールドの制作
クローラ,車輪,4脚移動機構での踏破難易度の基準を調べる実験.画像は4脚ロボットでの踏破の例。
これまでに開発したシミュレーション環境
クローラ,車輪,4脚移動機構での踏破難易度の基準を調べる実験.画像は4脚ロボットでの踏破の例。
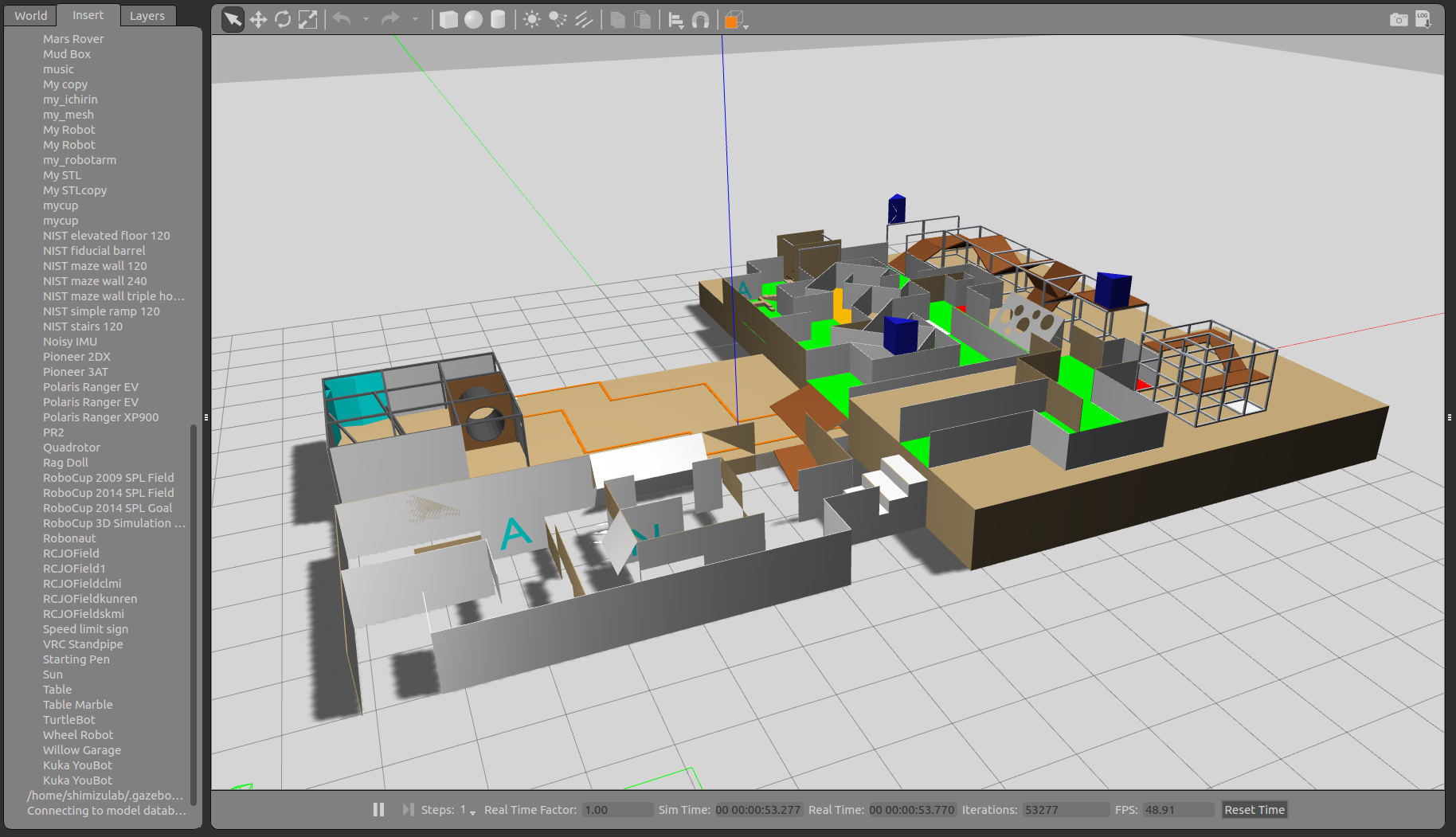
レスキューロボットの遠隔操作訓練を 効果的に行えるようにゲーム要素を取り入れた。 実際にロボカップジャパンオープン レスキュー実機リーグで使用したフィールドを シミュレーション用モデルとして構築し, ゲーム要素(装飾,色,音,イベント)を付与し, その効果を測定した。
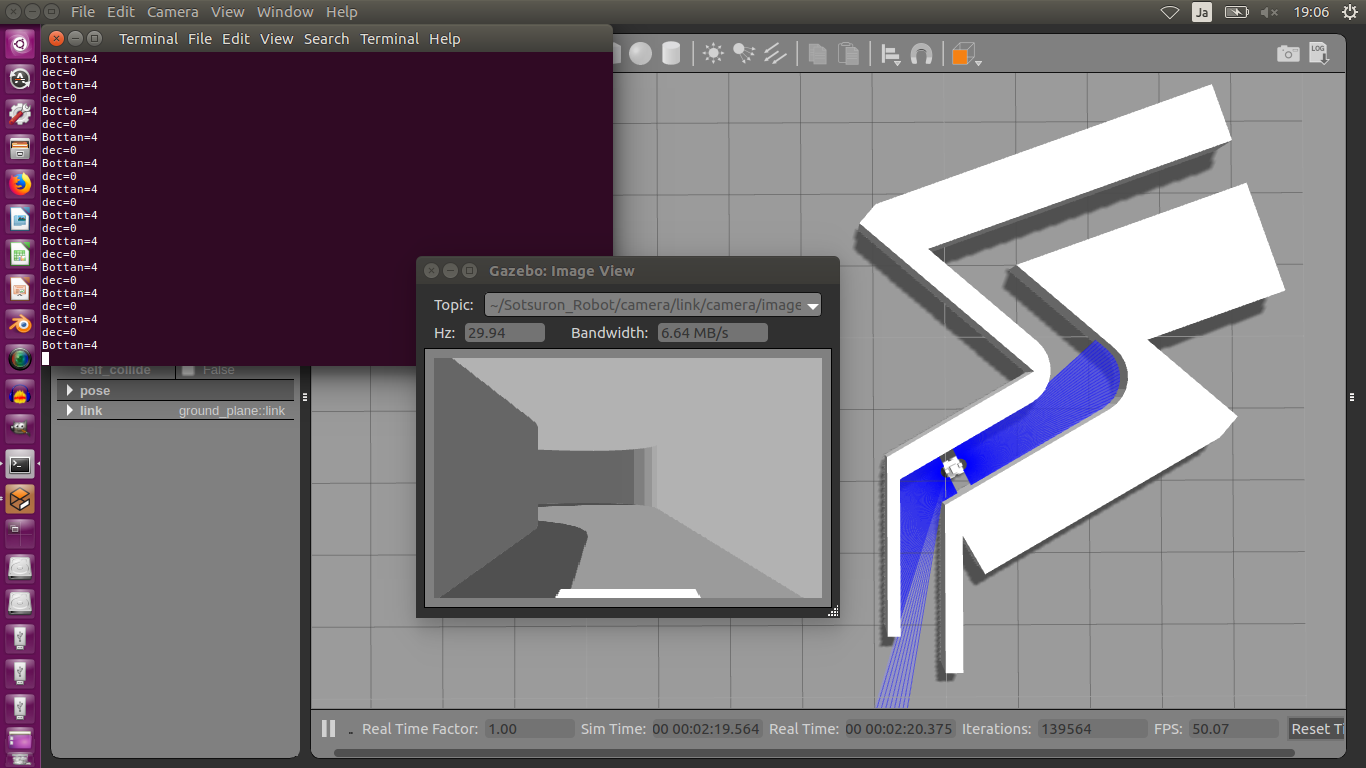
ロボットが自動的に通路に沿って曲がってくれると オペレータの負荷が軽減されるなどのメリットがある。 画像は,多くのロボットに搭載されている距離センサを使って, 簡単なアルゴリズムで曲がりくねった通路に対応する実験の例である。
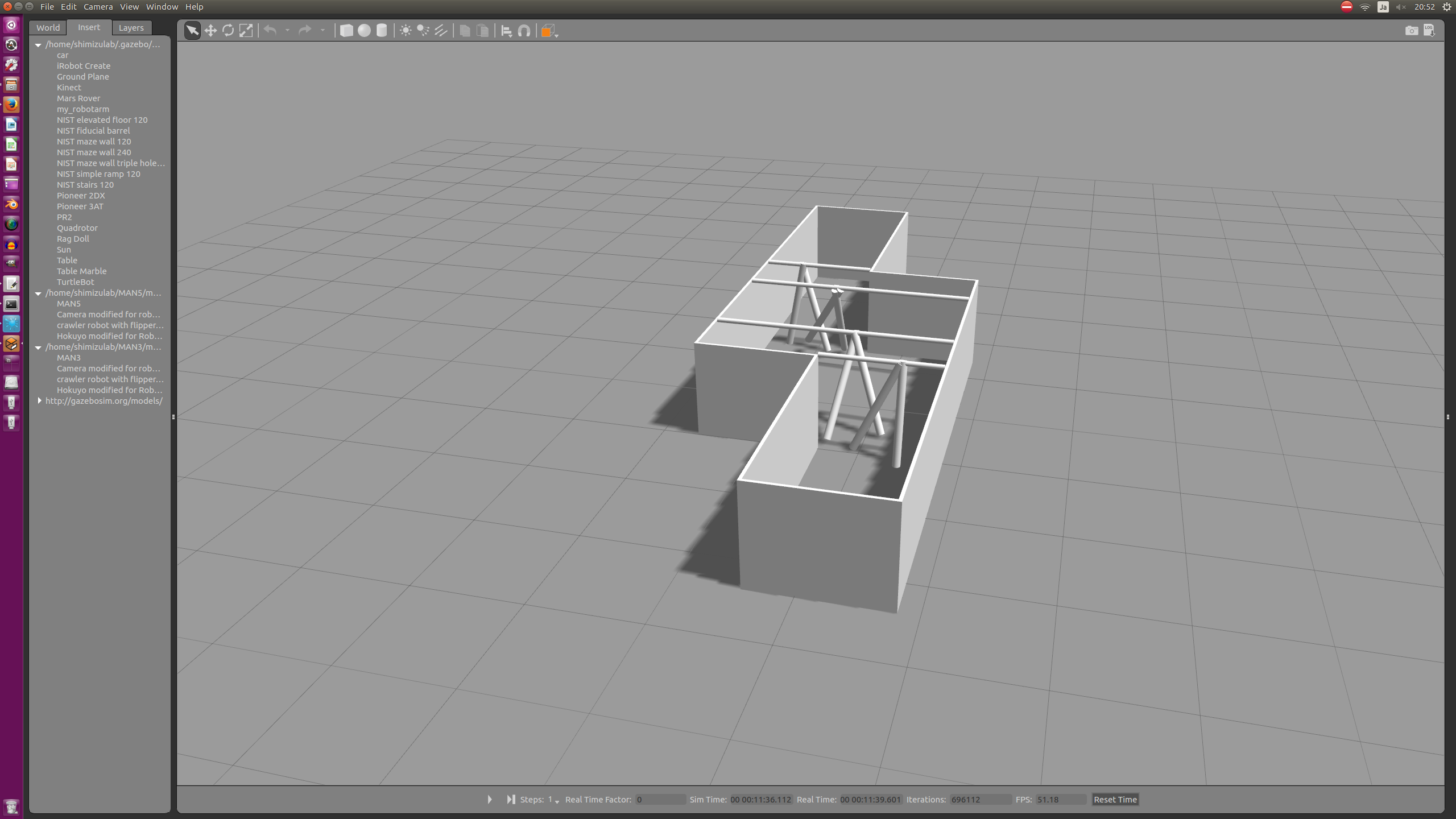
レスキューロボットの評価を行う手法として アメリカNISTで公開されているSTMをシミュレーションモデルとして 構築し,現在は想定されていない形(例えば蛇型ロボット)にも対応 するにはどうすれば良いのかを検討した。画像は,瓦礫内を再現した ネゴシエーションと呼ばれるタイプのSTMモジュール。
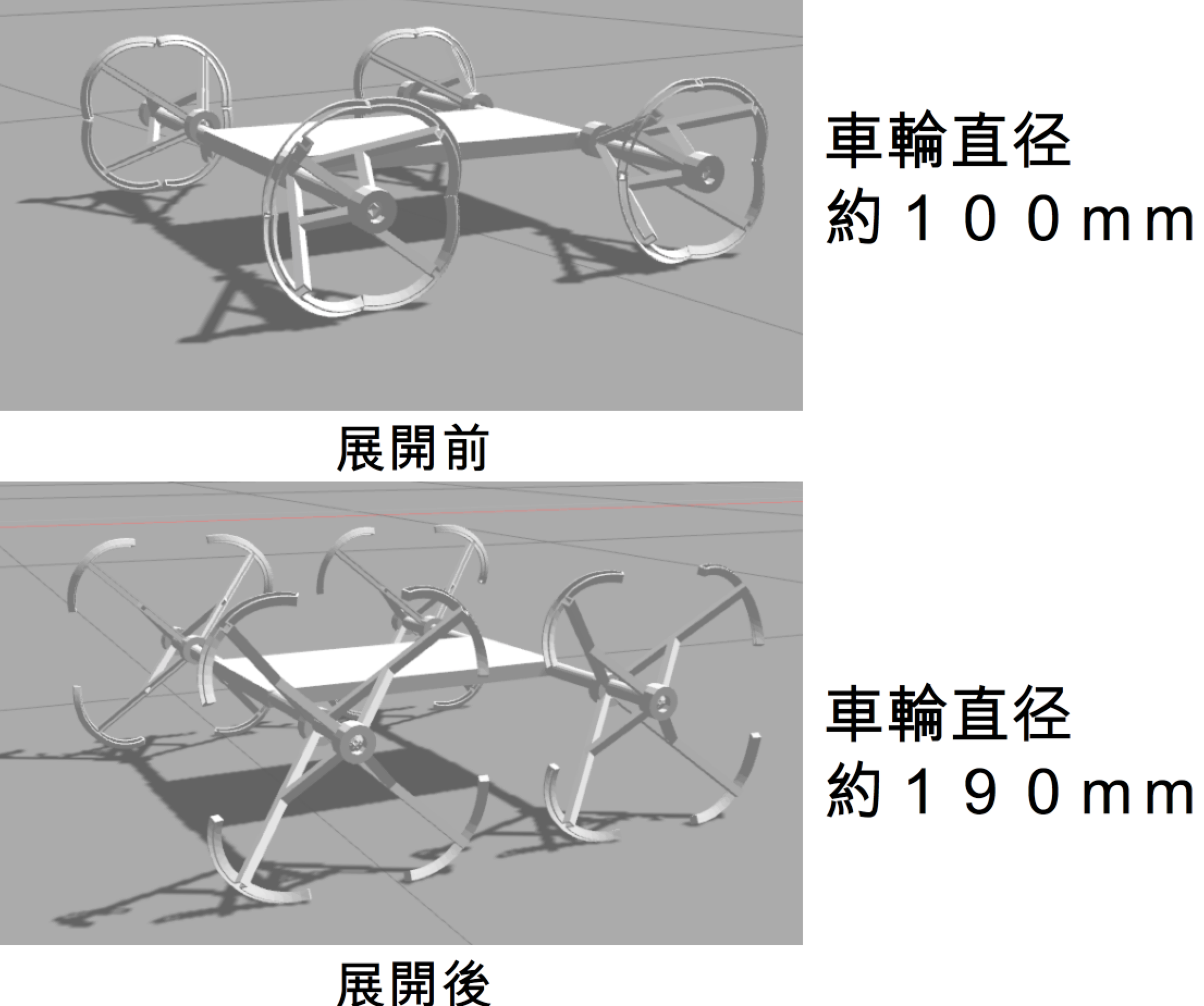
車輪径は大きい方が有利であるが, レスキューロボットは狭いところに入るときは 小さな車輪の方が都合が良い。この研究では 傘の開閉機構を使用して車輪系を変更できる 車輪を用意し,そのメリット・デメリットを 瓦礫や通路を走行して評価した。
{kind=link}
{kind=link}
{kind=link}
{kind=link}