


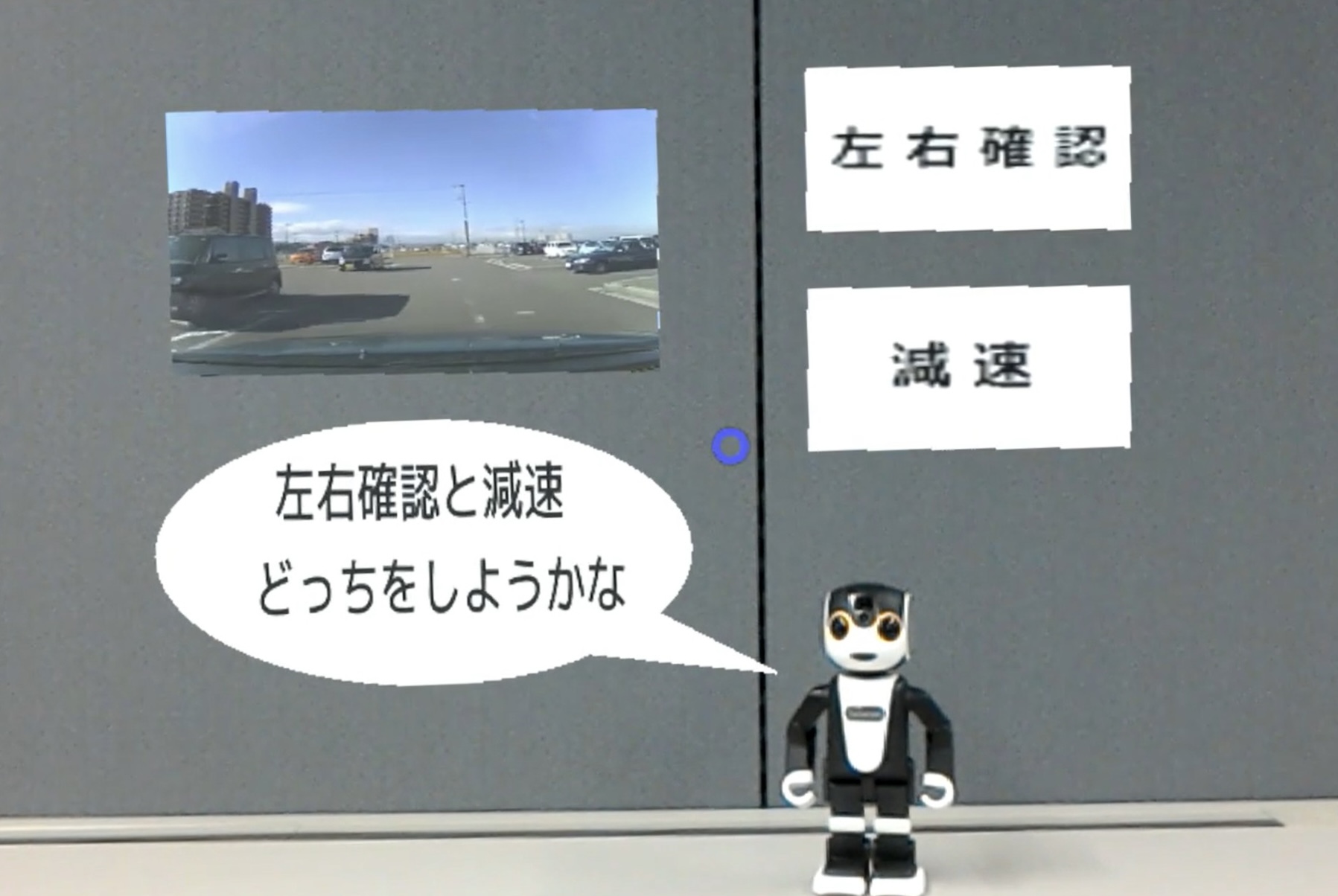

高齢ドライバーの運転技能の維持・向上を促す取り組みとして、現在は教習所での講習が主に行われています。しかしこの方法には、決められた時間に指定の場所へ通う必要があるという時間的・地理的な制約があり、繰り返し実施することが難しく、継続的な振り返りには適していません。こうした課題を解決するために、本研究では、自宅などの身近な環境で、より気軽に自身の運転を見直すことができる新たな仕組みとして、「運転振り返りロボット」の開発を進めています。このロボットは、運転時に同乗し、帰宅後にドライバーと共に走行映像を用いて運転内容を振り返ることで、運転行動の改善を支援することを目的としています。

 |
 |
 |
 |

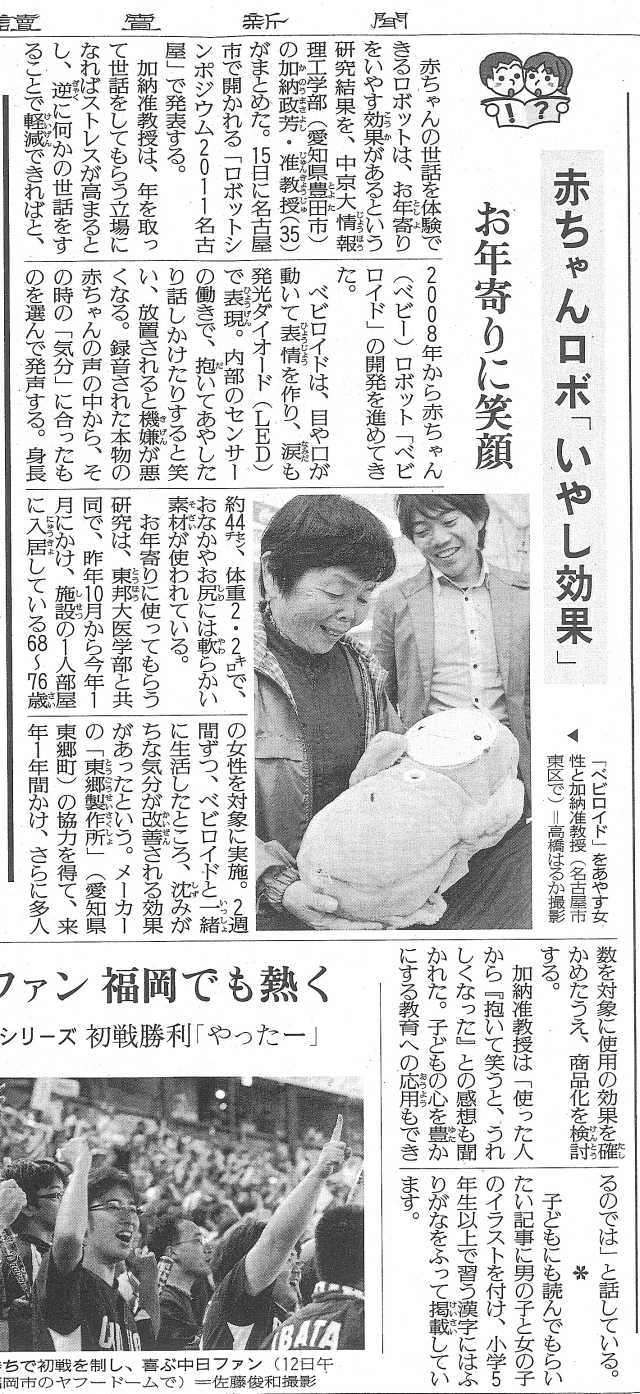
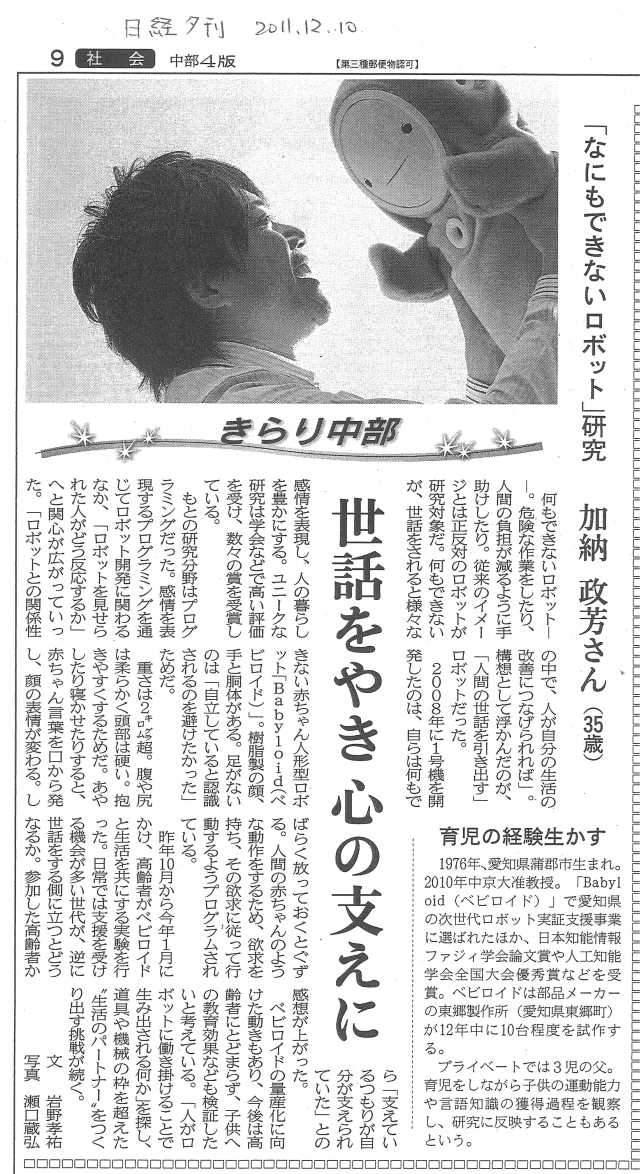

人が生きがいを持つためには、仕事などの周囲との積極的な関わりが必要ですそのためには、いつでも関わり合える存在がその人の周囲に常にいる状態が望まれます。本研究では、人と共生する「世話されるロボットBabyloid(Baby doll -oid)」を開発しています。ロボットの世話という役割によって、人からの意図的な関わり合いを促すことで、生きがいを感じられる生活環境を構築することを考えました。
福祉分野においては、赤ちゃん人形を使ったDoll Therapy(人形療法、赤ちゃん人形療法)が実施されています。Babyloidにも独居高齢者や認知症患者の精神性・社会性の改善といった効果が期待できます。
Babyloidは、改良の後、2015年1月より株式会社東郷製作所からスマイビとして、 2016年8月よりミサワホームからスマイビSとして販売されています

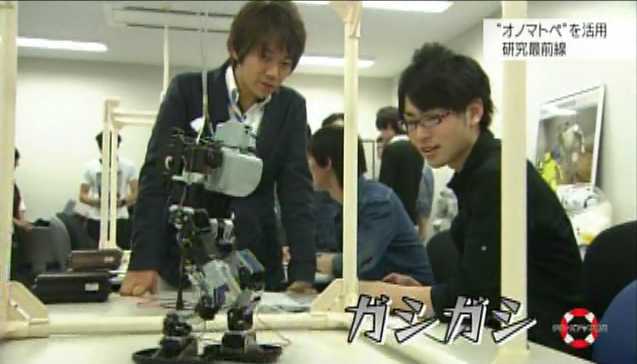
オノマトペは、「擬音語」「擬態語」「擬声語」の総称であり、物体の音や響き、状態などを感覚的に表現したものであり、 一般的な語彙に比べて臨場感にあふれた繊細な表現や絶妙な差異を表現することができます。本研究では、オノマトペをロボットの動作生成や操作に利用します。オノマトペを用いた感覚的な情報のやり取りによって、ロボットとの間に言語的・論理的な関係性のみならず、心理的な関係性を築けるのではないかと考えています。
(明治大学小松先生、名古屋工業大学中村先生との共同研究)

 |
 |
 |
 |
 |
 |
 |
 |

今後、人とロボットが共生する世の中になっていくと想像されます。本研究では、人と共に学び合うロボット(教育支援ロボット)の開発を進めています。
(名古屋大学古橋先生、吉川先生、ジメネス先生、名古屋工業大学中村先生との共同研究)
本研究では、ロボットがロボット自身の身体性に基づいた感情表出を行うことで、 人とロボットとのコミュニケーションに心理的インタラクションを創発させることを目指しています。

 |
 |
 |
 |
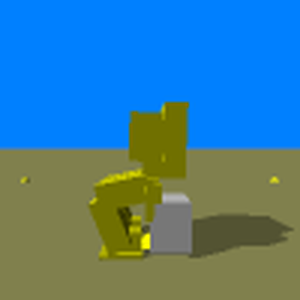
||
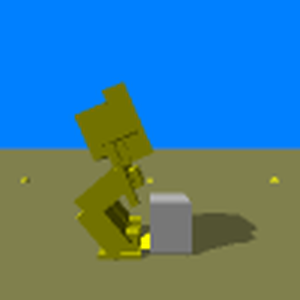
| 300回目の動作 | |||||
 |
 |
 |
 |
 |
|
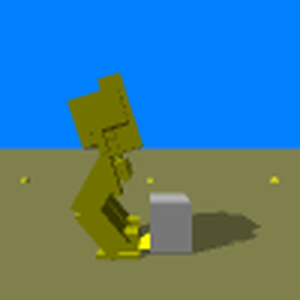
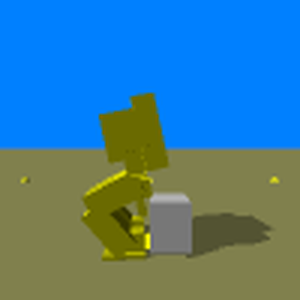
| 1031回目の動作 | |||||
 |
 |
 |
 |
 |
 |
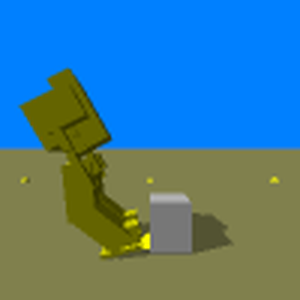
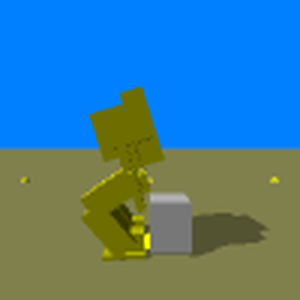
| 1564回目の動作 | |||||
 |
 |
 |
 |
 |
 |
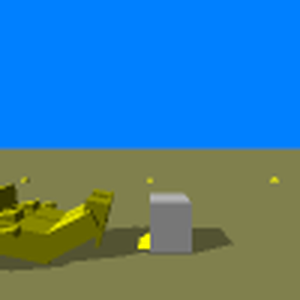
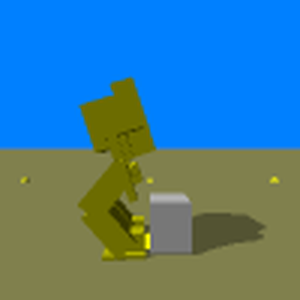
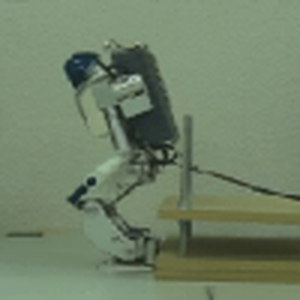
| 実機の動作 | |||||
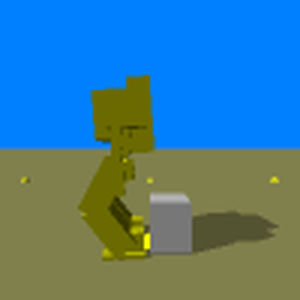
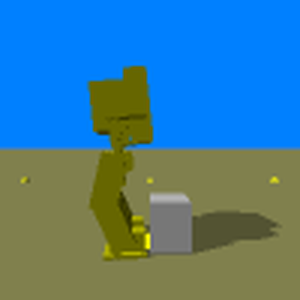
本研究では、不確実性や想定外の変化が起こる実環境に適応的に対処するための制御則を、ロボットが学習・進化を通じて自動的に獲得することを目指しています。

運動能力が低下した高齢者は家に閉じこもりがちになるため、社会性の低下が懸念されています。また、高齢化の進む日本では、高齢者を支える労働人口の増加は期待できないため、ロボットによる自立支援技術への期待が高まりつつあります。本研究では、高齢者が使用するシルバーカーに着目して研究を進めています。
シルバーカーは、買い物などの外出や荷物の運搬などを支援する歩行支援機器ですが、動力源がなく、坂道では荷物の重量によって身体に大きな負担がかかるため、電動アシスト付シルバーカーを開発し、身体的な負担の軽減効果を調査しています。
(中京大学種田先生、名古屋工業大学中村先生、株式会社アスカとの共同研究)
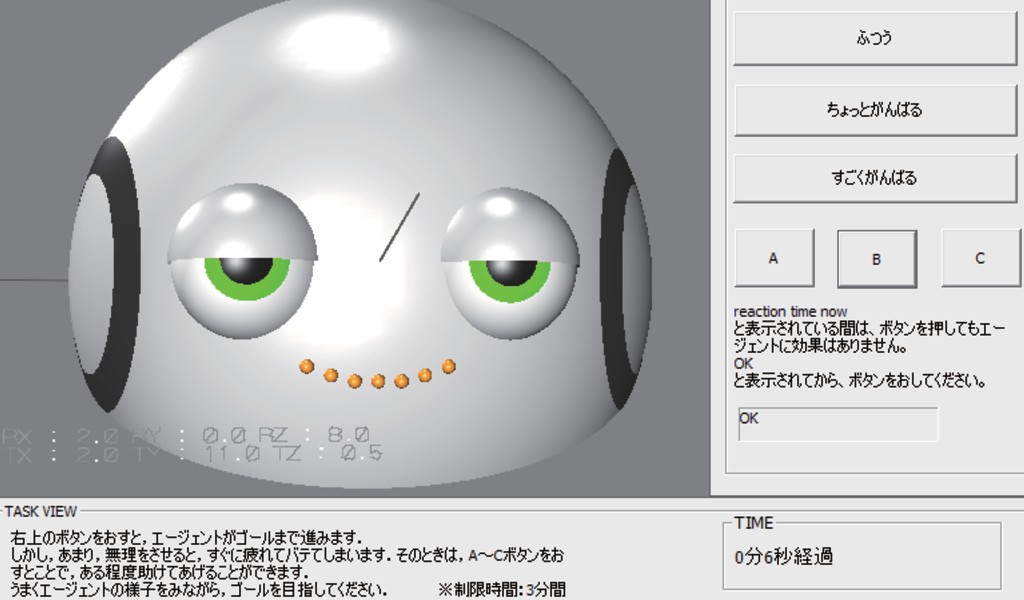
自己充足性とは動物が長期間にわたって自身を維持する能力のことです。例えば、ロボットであれば、バッテリレベルを維持するために燃料供給を行う、などが考えられます。自らの維持は、直感的には、このように自己的に行われると思われがちですが、実世界に目を向けると「他者的」に行われる場合も数多く見受けられます。たとえば赤ん坊の自己充足の方法です。赤ん坊は、母親という絶対的な依存者を有しており、母親を介して自己充足性を満たしています。言い換えますと、赤ん坊は、心理・生理状態の不安定さや身体状態の不調を、顔表情や身体動作で表現することで、母親にその状態を察知してもらい、自らの状態を改善しています。
本研究では「他者的に自己充足性を満たす」点に着目した研究を進めています。
中京大学 工学部 機械システム工学科 人間共生ロボティクス研究室(加納研究室)
Contact With Us