研究テーマ
主な研究テーマの紹介
本研究室では,ロボット及びその周辺分野,人間工学などの研究を行なっています.
以下は2019年度までの研究
(福岡工業大学 木野研にて)
ワイヤ駆動方式を利用した産業用ロボットの実用化
ワイヤ駆動方式のロボットは、従来の産業ロボットに比べ高出力、広い稼動範囲、 省電力などの多くのメリットがあります。本研究ではワイヤ駆動方式の産業用ロボット の実用化を目指して、諸問題の解決に取り組んでいます。
-
【動画】 6本ワイヤロボットの位置制御1
-
【動画】 6本ワイヤロボットの位置制御2
受動歩行の解析

受動歩行は、モータもセンサも搭載していない関節のみのリンク構造体が、 坂道を歩行していく現象です。このように人間の骨格構造はそもそも歩行に適した 構造を有します. 本研究では受動歩行の解析を行い、ロボットの歩行技術の向上を目指します。
-
【動画】 受動歩行ロボット KAMURA-1
-
【動画】 受動歩行ロボット KAMURA-2
-
【動画】 受動歩行ロボット KAMURA-KTY
筋骨格構造の解析
人体は,骨の周りに筋肉が付着する筋骨格構造を有します. 熟練した人間の動作は,主にフィードフォワード制御により 運動されていると言われます. 本研究では,人間の筋骨格構造の特性に注目し, センサを用いないフィードフォワード位置制御の研究をしています.
-
【動画】 1リンクシステムのフィードフォワード位置決め実験
-
【動画】 フィードフォワード位置決めシミュレーション
テンセグリティ構造を有するロボット
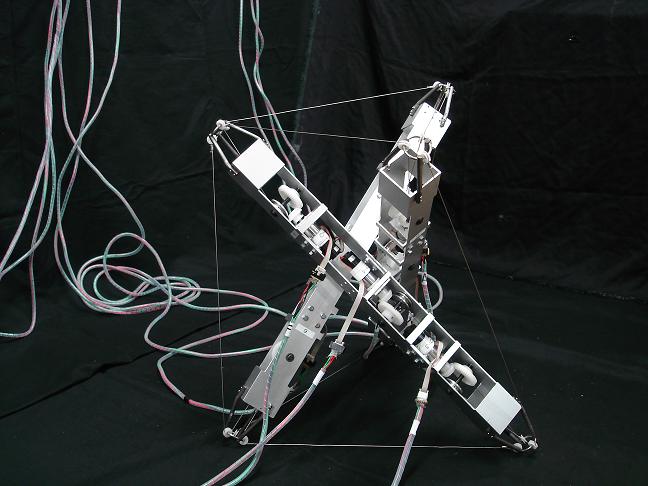
テンセグリティ構造とは,多数のロッドとケーブルで構成させる構造物です. 本研究ではケーブルの長さを変化させ,形状を変形するロボットの開発を行っています. 周囲の環境や目的に応じて,自分自身を変形できるのが特徴です.
-
【動画】 変形シミュレーション
-
【動画】 転がり動作シミュレーション
-
【動画】 テンセグリティロボット試作5号機
形状記憶合金の制御

形状記憶合金線をロボットのアクチュエータとして利用する研究です. 長さの制御法や形状記憶合金線を用いたパラレルロボットを開発しています.
-
【動画】 2自由度システム 円軌道制御実験
-
【動画】 5自由度システム 円軌道軌制御実験
柔軟な線形アクチュエータ

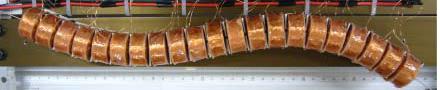
筋肉のように柔軟に変形する線形アクチュエータです. 将来的にロボットに利用することを目指しています.
-
【動画】 基礎動作実験1
-
【動画】 基礎動作実験2
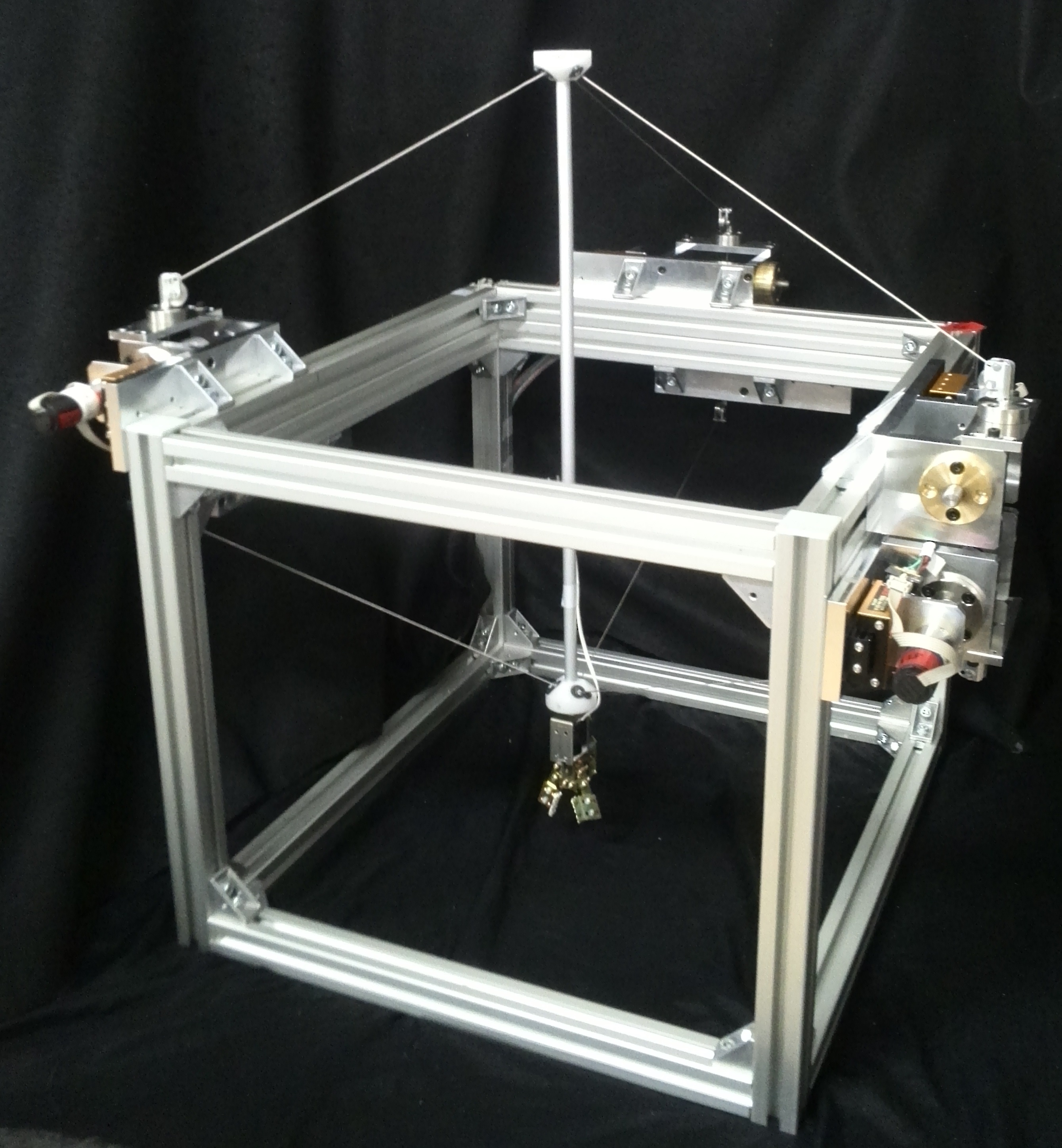
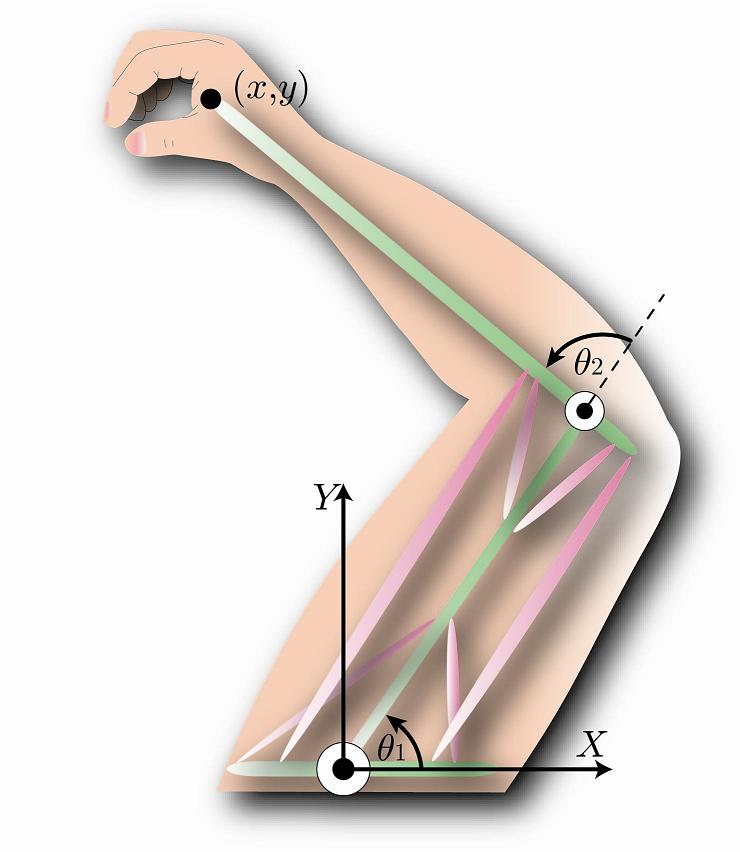
人体の腕・脚のトルク計測
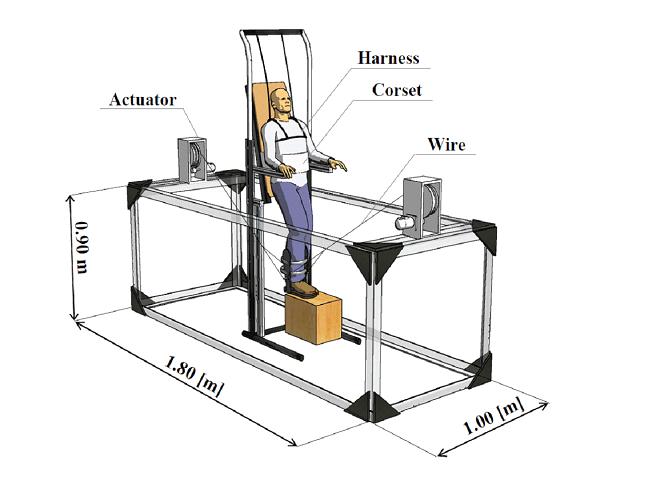
人間の運動中に関節には,どのようなトルクが発生しているかを 計測することは,人間の動作解析における重要な要素の1つです. このシステムでは,パラレルワイヤ駆動ロボットと繰り返し学習制御を 利用して,人体の腕や脚の運動中のトルクを計測します.
-
【動画】 腕のトルク計測実験(1.7 M)
-
【動画】 脚のトルク計測実験(11 M)
水上ロボット
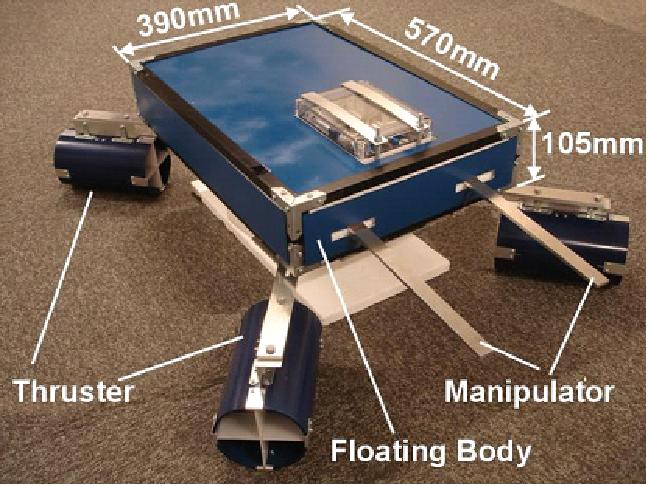
水の上を浮かんで,作業をするロボットです.目的の作業に応じて スラスターの配置を変更させることが出来ます.
-
【動画】 スラスター動作実験
-
【動画】 水上実験
柔軟ロボット
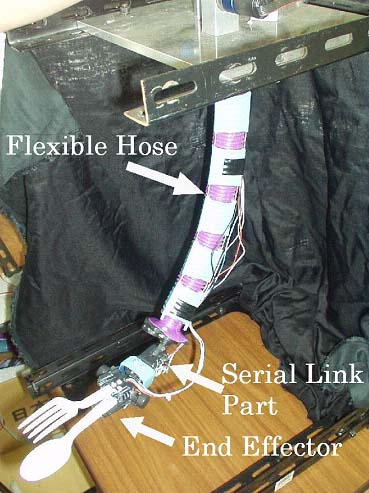
ホースとワイヤ駆動を利用した柔軟ロボットです. 可動部が軽量・柔軟であるために高い安全性を有します.
-
【動画】 位置制御実験
-
【動画】 人間の腕の筋電を測定し,連動させる実験
以下は2000年度までの研究
(立命館大学 有本・川村・伊坂研にて)
【パラレルワイヤ・シリアル機構を有する力覚呈示装置】

パラレルワイヤ駆動システムの利点とシリアル機構の利点を併せ持つシステム.
バーチャルリアリティ(仮想空間内)において,人間に力を呈示することができます.
-
【動画】 試作システム動作実験
【パラレルワイヤ駆動システムを利用した巨大空間作業ロボット】

ワイヤ巻取り用のアクチュエータをより遠方に配置することで,
容易に大きな可動領域を得ることが出来る巨大作業空間ロボット.
-
【動画】 8本ワイヤシステム動作実験
【パラレルワイヤ駆動システムを利用した超高速ロボット】
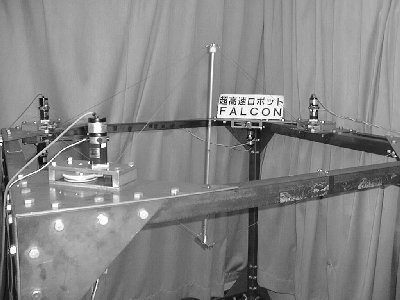
一般のロボットのリンクに比べ,質量をほとんど無視できるワイヤをパラレルリンクとして用いたロボット.
可動部の著しい軽量化が可能であり,それに伴い,
小型モータの利用にかかわらず,超高速運動の実現が容易となる.
-
【動画】 7本ワイヤシステム動作実験
